https://mp.weixin.qq.com/s/hnS38nTCgLKpOSWCz0bAFA
2.1 OpenUAV:高真实感无人机仿真平台与视觉语言导航数据集
· 项目主页:
https://prince687028.github.io/OpenUAV/
· 核心问题: 解决无人机视觉语言导航 (VLN) 领域缺乏高真实度、连续动作空间的标准化仿真平台和基准的问题。
· 主要贡献: 构建了高真实感仿真平台OpenUAV,并发布了首个连续动作空间的无人机 VLN 数据集以及UAV-Need-Help基准,引入“助手”机制探索人机协作。
OpenUAV平台与UAV-Need-Help 基准
3.1 OpenUAV仿真平台以及UAV-Need-Help数据集
OpenUAV仿真平台基于UE4虚幻引擎和Airsim插件,实现了高质量的无人机动力学和视觉仿真。目前,平台已包含22个场景,可分为城市、城镇、森林、沙漠等类型,现有物体资产数量96个,包括汽车类、自行车类、人类、动物、帐篷、桌椅、路标等物件,且支持进一步扩展。基于OpenUAV仿真平台,团队同时构建了UAV-Need-Help数据集,其包含12149条无人机飞行轨迹,包含76种目标物体,横跨20个场景,为无人机视觉语言导航任务提供了有力的数据基础。
资源链接:
https://github.com/prince687028/TravelUAV

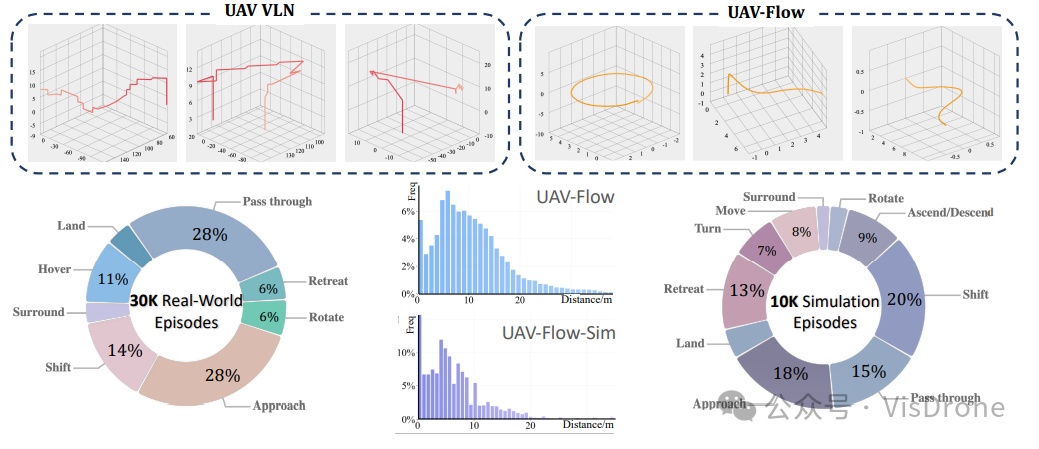
2.2 UAV-Flow: 面向近距离精细导航的真实世界基准
· 项目主页:
https://prince687028.github.io/UAV-Flow/
· 核心问题: 填补现有研究在无人机低层次、精细化语言交互控制方面的空白。
· 主要贡献:首次定义了 Flow (Flying-on-a-Word) 任务 ,并构建了首个支持语言精细控制的真实世界数据集 UAV-Flow。同时,提出了地面-无人机协作策略以解决端侧算力限制。
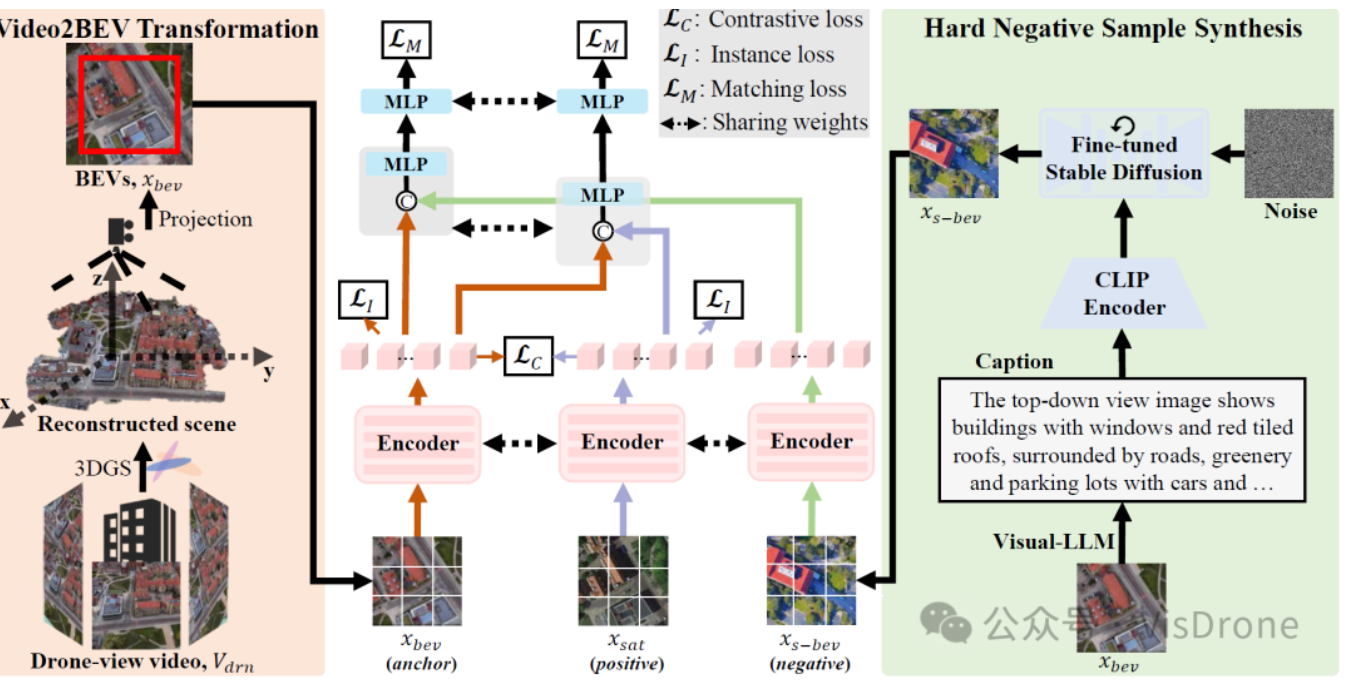
2.3 Video2BEV: 面向无人机精细地理定位的感知算法
· 项目仓库:
https://github.com/HaoDot/Video2BEV-Open
· 核心问题: 解决无人机视觉地理定位时,无人机低空视角与卫星鸟瞰图(BEV)之间存在巨大视角差异和严重遮挡,导致的匹配困难问题 。
· 主要贡献: 提出了 Video2BEV 范式,创新性地利用 3DGS 技术将无人机视频重建为鸟瞰图(BEV),以克服视角差异,并构建了基于视频的地理定位新数据集 UniV。